.jpg)
Paper Translation 5|Object detection method for ship safety plans using deep
Ship detection for visual maritime surveillance from non-stationary platforms☆
Abstract
This paper presents a new ship target detection algorithm to achieve efficient visual maritime surveillance from non-stationary surface platforms, e.g., buoys and ships, equipped with CCD cameras. In the proposed detector, the three main steps including horizon detection, background modeling and background subtraction, are all based on Discrete Cosine Transform (DCT). By exploiting the characteristics of DCT blocks, we simply extract the horizon line providing an important cue for sea-surface modeling. The DCT-based feature vectors are calculated as the sample input to a Gaussian mixture model which is effective in representing dynamic ocean textures, such as waves, wakes and foams. Having modeled sea regions, we perform the ship detection using background subtraction followed by foreground segmentation. Experimental results with various maritime images demonstrate that the proposed ship detection algorithm outperforms the traditional techniques in terms of both detection accuracy and real-time performance, especially for complex sea-surface background with large waves.
本文提出了一种新的船舶目标检测算法,以实现从非静止水面平台(如浮标和船舶)上高效的视觉海上监视。在该检测器中,地平线检测、背景建模和背景减去三个主要步骤都是基于离散余弦变换(DCT)的。通过利用DCT块体的特征,我们简单地提取了水平线,为海面建模提供了重要线索。将基于dct的特征向量作为样本输入计算到高斯混合模型中,该模型能够有效地表示波浪、尾迹和泡沫等动态海洋纹理。在建立了海域模型的基础上,采用背景减法和前景分割法对船舶进行检测。对各种海洋图像的实验结果表明,该算法在检测精度和实时性方面都优于传统的舰船检测算法,特别是在具有大波的复杂海面背景下。
1. Introduction
Sea-surface platforms are commonly deployed for a wide variety of tasks and operations, such as open ocean exploration, supervisory control of Autonomous Underwater Vehicles (AUVs) and Remotely Operated Vehicles (ROVs), oil and gas drilling, ecological monitoring and sampling, and homeland security surveillance (Y. Zhang et al., 2016; Li et al., 2014). For non-stationary platforms, e.g., buoys and ships, it is of great importance to develop an automated maritime surveillance system, especially in wide open waters. Such a visual monitoring tool in the military applications enables significant cap-abilities for safeguarding maritime rights and interests, strengthening supervision and management of sensitive areas, resolving maritime disputes, and detecting illegal activities. It adds a great deal of convenience to civil applications as well, e.g., port traffic management, maritime search and rescue.
海面平台通常用于各种各样的任务和操作,如开放海洋勘探、自主水下航行器(auv)和遥控航行器(rov)的监督控制、石油和天然气钻探、生态监测和采样以及国土安全监视(Y. Zhang等人,2016;Li et al., 2014)。对于非固定平台,例如浮标和船只,开发一种自动化海上监视系统是非常重要的,特别是在宽阔的开放水域。这种可视化监控工具在军事上的应用,为维护海洋权益、加强对敏感地区的监督管理、解决海洋纠纷、侦查非法活动等提供了巨大的能力。它也为民用应用带来了极大的便利,如港口交通管理、海上搜救等。
The current maritime surveillance systems are mainly based on air-/space-borne Synthetic Aperture Radar (SAR), High Frequency Surface Wave Radar (HFSWR), regular ship-based radars, and air-/space-borne optical sensors (Tello et al., 2005; Sciotti et al., 2002; Zhu et al., 2010; Künzner et al). The SAR equipment can cover an ultra-wide range and operate continuously under all-weather conditions at the expense of limited image resolution. For optical sensors, the infrared camera provides longer view distance relative to typical cameras, especially at night or in low visibility (Withagen et al., 1999; Broek et al., 2000). However, the low-resolution imagery and high power consumption of infrared cameras limit access to the deployment of autonomous surveillance systems. In comparison, visible-light images captured by optical cameras generally contain rich color and texture information, which enable people to interpret and recognize the scene more readily. Additionally, the visible-light camera has the advantages of low-cost, easy installation and low power consumption. More importantly, such a camera can be employed for military security, since the passive imaging modality does not expose the location of the surveillance system. This has motivated the development and improvement of optical systems over the past decades, to meet the critical need of maritime scene monitoring at improved imaging resolution by integrating with other sensors (Fefilatyev et al., 2012).
目前的海上监视系统主要基于空/星载合成孔径雷达(SAR)、高频表面波雷达(HFSWR)、常规舰载雷达和空/星载光学传感器(Tello等人,2005年;Sciotti等人,2002年;朱等,2010;Kunzner等)。SAR设备可以覆盖超宽的范围,并在全天候条件下连续工作,但以有限的图像分辨率为代价。对于光学传感器,红外相机相对于典型相机提供了更长的视距,特别是在夜间或能见度低的情况下(Withagen et al., 1999;Broek et al., 2000)。然而,红外摄像机的低分辨率图像和高功耗限制了自主监控系统的部署。相比之下,光学相机捕捉到的可见光图像通常包含丰富的颜色和纹理信息,使人们更容易对场景进行解读和识别。此外,该可见光相机具有成本低、安装方便、功耗低等优点。更重要的是,这种相机可以用于军事安全,因为被动成像方式不会暴露监视系统的位置。这推动了光学系统在过去几十年的发展和改进,通过与其他传感器集成,以满足提高成像分辨率的海上场景监测的关键需求(Fefilatyev等人,2012)。
Based on the platform structure, the visual maritime surveillance system can be divided into two categories: video surveillance with stationary/non-stationary cameras. The stationary surveillance sys-tems are generally employed in harbor, port, and coast applications where the background remains basically unchanged. On the other hand, the non-stationary surveillance equipment usually works in open waters far away from the coastline using cameras mounted on moving ships or swaying buoys. In this case, the captured scene keeps changing due to the platform movement. This study is aimed at devising a solution for ship target detection from buoy-/ship-based visual sur-veillance, which can motivate more maritime applications for the realization of intelligent visual sensor networks with on-board video processing and real-time bi-directional communication.
根据平台结构,可视海上监视系统可分为两类:固定式/非固定式摄像机视频监视。固定式监视系统一般应用于背景基本不变的港口、港口和海岸应用。另一方面,非固定式监视设备通常在远离海岸线的开放水域工作,使用安装在移动船只或摇摆浮标上的摄像机。在这种情况下,由于平台的移动,捕获的场景不断变化。本研究旨在设计一种基于浮标/船基视觉监视的船舶目标检测解决方案,为实现具有舰载视频处理和实时双向通信的智能视觉传感器网络提供更多的海上应用。
Some earlier works on automatic detection techniques for ships or surface objects have been proposed based on video imagery informa-tion. These methods generally fall into three categories. The first class is based on the background modeling and subtraction (Wang et al., 2005; Moreira et al., 2014; Prasad et al., 2017). Hu et al. (2011) proposed a vessel detection method in which the ocean background is simply modeled by median values of n video frames. Some authors (Bloisi and Iocchi, 2009; Frost and Tapamo, 2013; Grupta et al., 2009; Wei et al., 2009; Szpak and Tapamo, 2011; Robert-Inácio et al., 2007; Pires et al., 2010) used Gaussian functions to model the water surface followed by background subtraction. The Gaussian mixture model (GMM) statistically exploits the fact that each pixel belongs to the sea surface or to the ship (Moreira et al., 2014). Zhang and Zheng (2011) and Borghgraef et al. (2010) modified the conventional GMM to break down the challenging problem of fast moving maritime targets. However, these methods, primarily designed for fixed cameras, do not generally offer good detection / surveillance performance for non-sta-tionary platforms with a high degree of variability.
一些基于视频图像信息的船舶或水面物体自动检测技术的早期工作已经被提出。这些方法通常分为三类。第一类是基于背景建模和减法(Wang et al., 2005;莫雷拉等人,2014;Prasad等人,2017)。Hu et al.(2011)提出了一种船舶检测方法,该方法简单地用n个视频帧的中值来模拟海洋背景。一些作者(Bloisi和Iocchi, 2009;弗罗斯特和塔帕莫,2013;Grupta等,2009;魏等,2009;斯帕克和塔帕莫,2011年;Robert-Inácio等,2007;Pires等人,2010)使用高斯函数对水面进行建模,然后进行背景减法。高斯混合模型(GMM)在统计上利用了每个像素属于海面或船舶的事实(Moreira et al., 2014)。Zhang和Zheng(2011)和Borghgraef等人(2010)修改了传统的GMM,以分解快速移动海上目标的挑战性问题。然而,这些方法主要是为固定摄像机设计的,通常不能为具有高度可变性的非静止平台提供良好的探测/监视性能。
The second category of ship detection methods is based on human visual attention model (Prasad et al., 2017). Itti et al. (1998) utilized a visual saliency map to analyze complex natural scenes. It segregates the regions of interest (high saliency) according to the local contrast which is consistently present at various length scales. However, it is not effective in dealing with wakes corresponding to the moving ships, since they introduce a high contrast over the surrounding pixels (Prasad et al., 2017). To achieve real-time detection, Hou and Zhang (2007) constructed the saliency map in spatial domain by extracting the corresponding spectral residual in spectral domain. Agrafiotis et al.(2014) designed a maritime tracking system by combining visual attention map with GMM. The tracking results are further refined using an adaptable online neural network tracker. Additional enhance-ment on visual attention model was realized by a two-scale detection scheme (Liu et al., 2013). At the larger scale, sea background is removed by a mean-shift smoothing algorithm. At the smaller scale, objects of interest are coarsely labelled using salient edge region extraction; post-processing for chrominance components provides more useful cues to select the output targets. Albrecht et al. (2011) modeled the visual maritime attention using multiple low-level image features in combination with a Bayes classifier. We conclude that these approaches based on visual attention model expect to reduce the noise of sea background at a larger scale as well as enhance the salient features of object regions. However, such methods usually do not perform well when large surface waves are involved in the scene. This is because the visual saliency map will probably become inaccurate if the salience of waves has the same or even higher order of magnitude compared to the original targets.
第二类船舶检测方法是基于人类视觉注意模型(Prasad et al., 2017)。Itti等人(1998)利用视觉显著图来分析复杂的自然场景。它根据在不同长度尺度上一致存在的局部对比来分离感兴趣的区域(高显著性)。然而,它在处理与移动船只相对应的尾迹时并不有效,因为它们比周围像素引入了高对比度(Prasad et al., 2017)。为了实现实时检测,Hou和Zhang(2007)通过提取光谱域中对应的光谱残差,构建了空间域的显著性图。Agrafiotis等(2014)将视觉注意地图与GMM相结合,设计了一种海上跟踪系统。利用可适应的在线神经网络跟踪器对跟踪结果进行进一步优化。通过双尺度检测方案实现了对视觉注意模型的额外增强(Liu et al., 2013)。在大尺度上,采用均值漂移平滑算法去除海洋背景。在较小的尺度上,使用显著边缘区域提取对感兴趣的对象进行粗标记;色度成分的后处理为选择输出目标提供了更有用的线索。Albrecht等人(2011)使用多个低级图像特征结合贝叶斯分类器对海洋视觉注意力进行建模。这些基于视觉注意模型的方法有望在更大范围内降低海洋背景的噪声,并增强目标区域的显著特征。然而,当场景中涉及到较大的表面波时,这种方法通常不能很好地执行。这是因为,如果波的显著性与原始目标具有相同甚至更高的数量级,则可视显著性图可能会变得不准确。
The other techniques apply edge and texture features to detect ship targets. For buoy-based visual surveillance, Fefilatyev et al. (2012) and Fefilatyev (2012) proposed a marine vehicle detection algorithm by exploiting the gradient information. After extracting the horizon by Hough transform, a global thresholding algorithm segments ship targets effectively from the background region above the estimated horizon. However, this method cannot work once the targets appear below the horizon. Although the edge and contour features (e.g., using Hough transform) are widely used in ship detection (Arshad et al., 2011; Yan et al., 2012; Xu et al., 2011), these methods generally do not achieve good performance for complex background. To make full use of various texture information in the sea-surface background, the detec-tion accuracy can be significantly improved by incorporating fractal feature (Liang et al., 2012). Using both color and texture components,Kumar and Selvi (2011) and Selvi and Kumar (2011) introduced an object classification algorithm based on Local Binary Pattern (LBP) for ship detection. The Histogram of Gradients (HOG) (Wijnhoven et al., 2010) is a commonly used feature representation. Loomans et al.(2013) devised a combination of a multi-scale HOG detector and a hierarchical KLT feature point tracker to track ships in harbors. This tracking system also incorporates an active camera to improve the tracking results under challenging conditions. In the Pascal Visual Object Classes (VOC) challenge, the Deformable Part Model (DPM) based on HOG achieved the best detection performance for twenty classes, including boats (Everingham et al., 2015). In Sullivan and Shah (2008), an enhanced Maximum Average Correlation Height (MACH) filter was applied for vessel detection by matching appearance tem-plates with testing sequences via Fast Fourier transform (FFT). The advantage of these appearance-based methods is that they do not rely on background modeling. In more recent works (Everingham et al., 2015; R. Zhang et al., 2016; Zou and Shi, 2016), the Convolutional Neural Network (CNN) features have achieved a substantial improve-ment in detection performance. While the above feature-based detec-tion schemes benefit from the texture consistency within sea-surface background, their computational complexities pose a rather serious challenge to real-time video communication over visual sensor net-works.
另一种方法是利用边缘和纹理特征来检测船舶目标。对于基于浮标的视觉监控,Fefilatyev等(2012)和Fefilatyev(2012)提出了一种利用梯度信息的海洋车辆检测算法。在Hough变换提取水平面后,全局阈值算法将船舶目标有效地从估计水平面以上的背景区域中分割出来。然而,一旦目标出现在地平线以下,这种方法就无法工作。尽管边缘和轮廓特征(例如,使用霍夫变换)被广泛应用于船舶检测(Arshad等人,2011;严等人,2012;Xu et al., 2011),对于复杂背景,这些方法通常不能取得良好的性能。为了充分利用海面背景中的各种纹理信息,结合分形特征可以显著提高检测精度(Liang et al., 2012)。Kumar和Selvi(2011)和Selvi和Kumar(2011)同时使用颜色和纹理成分,提出了一种基于局部二值模式(LBP)的目标分类算法用于舰船检测。梯度直方图(HOG) (Wijnhoven et al., 2010)是一种常用的特征表示。Loomans等人(2013)设计了一种多尺度HOG探测器和分层KLT特征点跟踪器的组合,用于跟踪港口中的船舶。该跟踪系统还包括一个主动摄像头,以改善在具有挑战性的条件下的跟踪结果。在Pascal可视对象类(VOC)挑战中,基于HOG的可变形部件模型(DPM)在包括船只在内的20个类中获得了最佳检测性能(Everingham等人,2015年)。在Sullivan和Shah(2008)中,通过快速傅立叶变换(FFT)将外观模板与检测序列进行匹配,采用一种增强的最大平均相关高度(MACH)滤波器进行船舶检测。这些基于外观的方法的优点是它们不依赖于背景建模。在最近的作品中(Everingham等人,2015;张锐等,2016;邹和Shi, 2016),卷积神经网络(CNN)特征在检测性能上取得了实质性的提高。上述基于特征的检测方案虽然得益于海面背景的纹理一致性,但其计算复杂性给视觉传感器网络上的实时视频通信带来了相当严重的挑战。
Aiming at visual maritime surveillance from non-stationary plat-forms, we propose an efficient ship target detection algorithm to achieve both high detection accuracy and real-time performance. Here, we first develop an effective learning strategy including simple horizon segmentation and complex sea-surface background modeling. In maritime scenario, ships usually appear around the position of the horizon line, occupying both sky and ocean regions. The horizon line can be used as a reference to limit the regions of interest and reduce the execution time of detection. After horizon detection, we can simply extract the sea-surface background regions below the horizon and only use these regions for background modeling. This lowers the probability of detection mistakes caused by the presence of background motion, e.g., waves, wakes, and foams. More importantly, such independent detectors for sky and sea regions increase the detection sensitivity to small objects around the horizon line. Therefore, an initial detector of horizon line is required before background modeling and object detection. In the proposed scheme, we can simply detect the horizon line by exploiting the characteristics of Discrete Cosine Transform (DCT) blocks. At the step of sea-surface background modeling, we present a novel DCT-based texture Gaussian mixture model to further separate ship targets from the complex sea-surface background below the horizon. Having detected the sea-surface background, we remove it and finally obtain ship targets according to the texture consistency. The main contribution of the proposed algorithm is to provide more accurate detection results within complex sea-surface background, which is of vital importance for ship-/buoy-based surveillance applica-tions in the presence of large waves. Experiments with real images are presented to assess the effectiveness of the proposed ship detection approach, in comparison to traditional techniques.
针对非平稳平台上的海上视觉监视,提出了一种高效的船舶目标检测算法,以达到较高的检测精度和实时性。在此,我们首先开发了一个有效的学习策略,包括简单的地平线分割和复杂的海面背景建模。在海上场景中,船舶通常出现在地平线的位置附近,既占据了天空,也占据了海洋。地平线可以作为参考,限制感兴趣的区域,减少检测的执行时间。地平线检测后,我们可以简单提取地平线以下的海面背景区域,只使用这些区域进行背景建模。这降低了由背景运动(如波浪、尾迹和泡沫)引起的探测错误的概率。更重要的是,这种针对天空和海洋区域的独立探测器增加了对地平线周围小物体的探测灵敏度。因此,在背景建模和目标检测之前,需要先对地平线进行初始探测。在该方法中,我们可以利用离散余弦变换(DCT)块的特性简单地检测出水平线。在海面背景建模阶段,提出了一种新的基于dct的纹理高斯混合模型,进一步将船舶目标从复杂的海面背景中分离出来。在探测到海面背景后,对其进行去除,最后根据纹理一致性得到舰船目标。该算法的主要贡献是在复杂的海面背景下提供更准确的探测结果,这对船舶/浮标在大浪环境下的监视应用至关重要。用真实图像进行了实验,以评估所提出的船舶检测方法的有效性,并与传统技术进行了比较。
In the remainder, we describe the implementation details of the proposed ship detection algorithm in Section 2, and compare its performance with previous techniques in Section 3. We present a summary and conclusions from this investigation in Section 4.
在剩下的部分中,我们将在第2节中描述所提出的船舶检测算法的实现细节,并在第3节中比较其与以前的技术的性能。我们在第4节中给出了这个调查的总结和结论。
2. The proposed ship detection algorithm
The maritime images acquired from a non-stationary platform typically contain the foreground of ship targets and the background of sea surface as well as sky. The main challenge for background subtraction and detection of foreground objects is the difficulty in modeling the dynamics of water, including waves, wakes and foams (Prasad et al., 2017). In order to improve the detection accuracy of maritime surveillance systems in open sea, we present a novel ship detection algorithm using DCT-based Gaussian mixture model (GMM). According to the characteristics of DCT coefficients, the proposed algorithm first detects the horizon line to extract the sea-surface regions for background modeling. In the procedure of sea-surface background modeling with GMM, we calculate the coefficient energies of three regions in each DCT block as the feature vectors, to feed the learning process of GMM. Once all the ocean regions are modeled , the vessels in these regions can be detected by classifying each image block into background or foreground.
从非静止平台上获取的海洋图像通常包含船舶目标的前景和海面背景以及天空。背景减去和探测前景物体的主要挑战是难以建模水的动力学,包括波浪、尾迹和泡沫(Prasad et al., 2017)。为了提高公海海上监视系统的检测精度,提出了一种基于dct的高斯混合模型(GMM)的船舶检测算法。该算法根据DCT系数的特点,首先检测水平线,提取海面区域进行背景建模。在基于GMM的海面背景建模过程中,我们计算每个DCT块中三个区域的系数能量作为特征向量,为GMM的学习过程提供支持。一旦建立了所有海洋区域的模型,就可以通过将每个图像块分为背景或前景来检测这些区域中的船只。
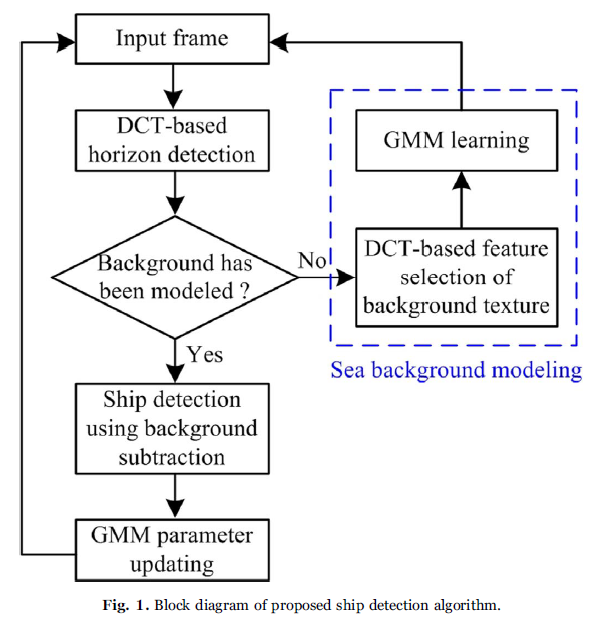
Fig. 1 outlines the procedure of the proposed ship detection scheme, including the detection of horizon line, the sea-surface back-ground modeling using GMM, and the ship detection using background subtraction. Next, we give the detailed description of each part in the proposed algorithm.
所提出的船舶检测方案的流程如图1所示,包括水平线的检测、GMM的海面背景建模和背景减去的船舶检测。接下来,我们对算法的各个部分进行了详细的描述。
2.1. DCT-based horizon detection
The initial detector of horizon line is required before background modeling and object detection. According to the characteristics of DCT coefficients, the proposed horizon detection algorithm involves the following steps:
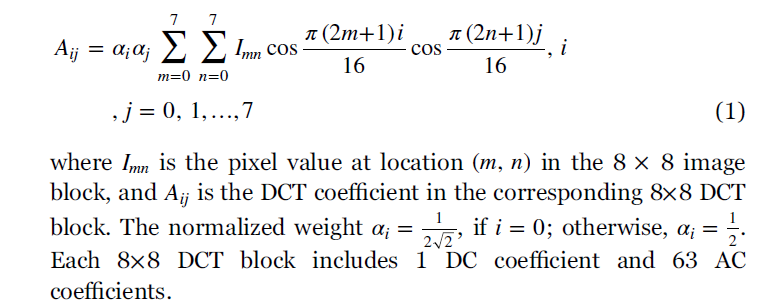
Decompose the luminance component of an input image into 8×8 non-overlapped blocks, and then apply DCT to these blocks:
Label a DCT block as sky/sea-surface region using the following measure:


Draw a horizon line approximately using the central points of all bottommost blocks in the sky region. In some cases, the ship targets may occupy a large fraction of sky background above the horizon line. In order to avoid the misclassification caused by ship targets, we only select the bottommost blocks with smooth changes in vertical direction (y-coordinates) for horizon detection.
在背景建模和目标检测之前,需要先对水平线进行初始检测。根据DCT系数的特点,提出的地平线检测算法包括以下步骤:
- 将输入图像的亮度分量分解为8×8不重叠的块,然后对这些块应用DCT:
- 用以下方法将DCT块标记为天空/海面区域:
- 用天空区域中所有最底部方块的中心点画一条水平线。在某些情况下,船舶目标可能占据地平线以上天空背景的很大一部分。为了避免船舶目标造成的分类错误,我们只选择垂直方向(y坐标)变化平缓的最底部块进行水平检测。
2.2. Sea-surface background modeling using GMM(使用GMM进行海面背景建模)
The background subtraction technique is an effective tool for moving object detection with stationary cameras, where a pixel-wise statistical background model is used to classify the input video stream into foreground and background regions. However, such pixel-based background modeling algorithm is mainly suitable for visual maritime surveillance from stationary platforms. Our goal is to address the issue of object detection from non-stationary platforms, such as buoys or ships. From a large range of video content types, we observe that the texture feature of sea surface is generally uniform and consistent regardless of whether the camera is stable or not. Considering the texture consistency of sea-surface background, we present a DCT-based background modeling method using texture features. According to the input video contents, this model should be realized by a learning mechanism which can quickly provide texture-based features for dynamic scene analysis of sea surface.
背景减法技术是静止摄像机运动目标检测的一种有效工具,该技术使用像素统计背景模型将输入视频流划分为前景和背景区域。但这种基于像素的背景建模算法主要适用于静止平台上的海上视觉监视。我们的目标是解决从非静止平台(如浮标或船只)上探测物体的问题。从大量的视频内容类型中,我们观察到,无论摄像机是否稳定,海面的纹理特征基本上是一致的。考虑到海面背景的纹理一致性,提出了一种基于dct的基于纹理特征的背景建模方法。根据输入的视频内容,该模型需要通过一种学习机制来实现,该学习机制能够快速地为海面动态场景分析提供基于纹理的特征。
2.2.1. DCT-based feature selection of background texture
The texture-based features in sea-surface background can be considered as the spatial distribution of intensity variations. Here, we define the texture feature as a three dimensional vector in DCT domain, as shown in Fig. 2. The DCT coefficients depicted by different colors account for the spectrum component in the corresponding direction. To elaborate, the white region R0 in the upper left corner denotes the direct-current component; R1 (green), R2 (yellow) and R3 (gray) regions represent the vertical, diagonal and horizontal frequency variation, i.e., horizontal, diagonal and vertical texture information. We calculate the energies E1, E2 and E3 of regions R1, R2 and R3 respectively to generate the texture-based feature vector X:
海表背景中的纹理特征可以看作是强度变化的空间分布。这里,我们将纹理特征定义为DCT域中的三维向量,如图2所示。用不同颜色表示的DCT系数表示对应方向的频谱分量。为了详细说明,左上角的白色区域R0表示直流分量;R1(绿色)、R2(黄色)和R3(灰色)区域分别表示垂直、对角和水平的频率变化,即水平、对角和垂直纹理信息。我们分别计算R1、R2和R3区域的能量E1、E2和E3,生成基于纹理的特征向量X:
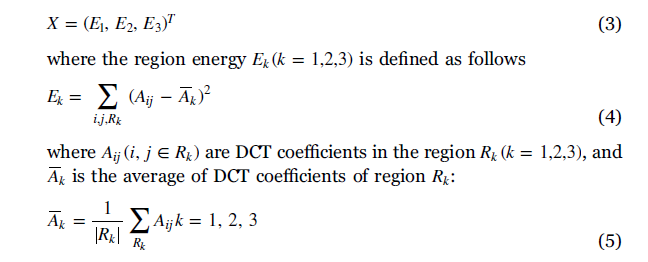
Accordingly, each block in the sea-surface background yields a corresponding texture feature vector denoted by i (Xi= 1,2, …,N); N is the total number of blocks or feature vectors within the sea-surface background region. Using these texture-based feature vectors, we can model the texture background of sea surface in the following section.
N为海面背景区域内的块或特征向量的总数。利用这些基于纹理的特征向量,我们可以在下一节中对海面的纹理背景进行建模。
2.2.2. Learning of Gaussian mixture model
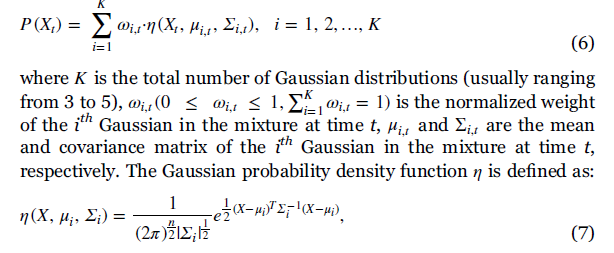
After the horizon detection described in Section 2.1, we can segment the sea-surface background from the sky background. We then categorize the sea-surface background regions into K clusters using Gaussian mixture model (GMM) (Wang et al., 2005). The GMM is based on the feature vectors described in Section 2.2.1. Let D = { ,XX12, …, tX} account for a sample set of 3-dimensional feature vectors X defined in Eq. (3). Each sample corresponds to a DCT block from K clusters with a certain probability. To quantify, the probability of Xt based on Gaussian distribution is written as (Wang et al., 2005):
在2.1节中描述的地平线检测之后,我们可以从天空背景中分割出海面背景。然后我们使用高斯混合模型(GMM)将海面背景区域划分为K个簇(Wang et al., 2005)。GMM基于2.2.1节中描述的特征向量。设D = {,XX12,…,tX}表示公式(3)中定义的三维特征向量X的样本集。每个样本对应K个聚类中的一个具有一定概率的DCT块。为了量化,基于高斯分布的Xt概率写为(Wang et al., 2005):
Since the DCT is an orthogonal transform, coefficients in a DCT block are independent of each other (Wang et al., 2005). Accordingly, the three components E1, E2 and E3 (coefficient energies) of X are mutually independent. As the covariance of independent variables is zero, the covariance matrix Σi,t is a diagonal matrix:
由于DCT是一个正交变换,DCT块中的系数是相互独立的(Wang et al., 2005)。因此,X的三个分量E1、E2和E3(系数能量)是相互独立的。由于自变量的协方差为零,因此协方差矩阵Σi,t为对角矩阵:

.png)